What We Do
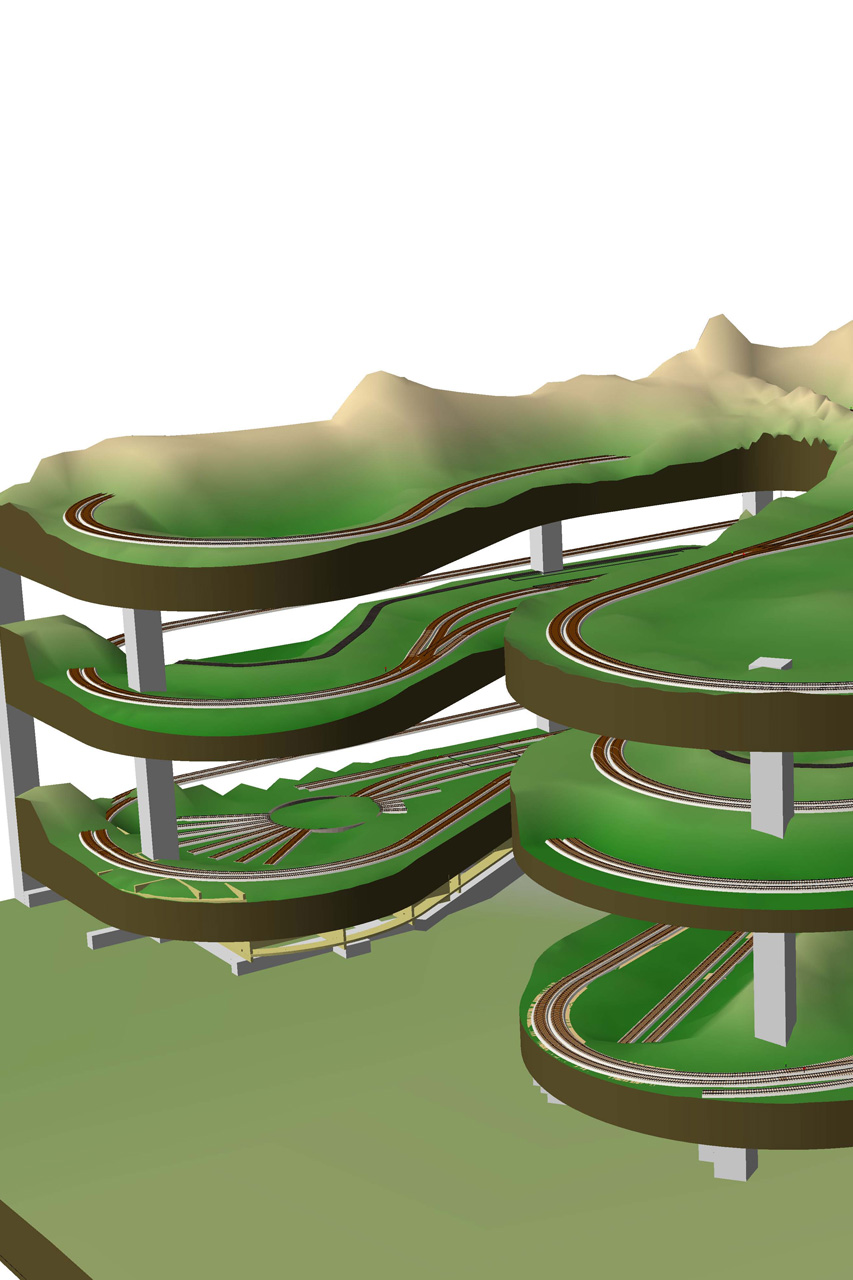
Design
From your initial spark of an idea to a fully-formed plan, James can turn your model railway dreams, whatever the size, into a beautifully designed layout.

Construction
Bespoke builds for you and your space mean you can access all parts of your railway. We do a full build or just baseboards and running track. It’s your choice.

Electrics
With James’ expertise in wiring and automation we can create a railway that lets you be as hands on as you want or simply sit back and watch your trains run.

Scenics
Whether it’s harking back to the early days of steam or an imaginative interpretation in the style of Emett, we can bring your model railway world into reality.